外科手術用ロボット鉗子に関する研究
外科手術用多自由度ロボット鉗子の開発
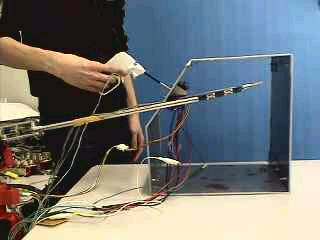
低侵襲外科手術用の多自由度鉗子を開発する。
(クリックするとmovieが見れます。) (クリックするとmovieが見れます。)
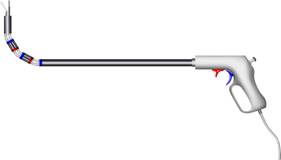
開発した多自由度鉗子に『DSD (Double- Screw-Drive) ロボット鉗子』と名前をつけました。
外科手術用ロボット鉗子のマスタ・スレイブ制御による操作性の向上
開発した多自由度ロボット鉗子をスレイブマニピュレータとし、マスタマニピュレータで遠隔操作する。
- 把持部の力覚制御
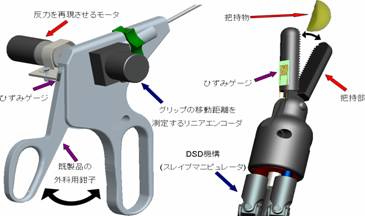

- 屈曲部の力覚制御